路内停车管理难、运营难、收益少,很大程度上是因为前端识别效果差,特别是传统高位视频技术,在自身安装俯角、倾斜角大和周边复杂环境的复杂影响下,存在漏报停车、误报异常等一系列问题,造成国有资产流失的同时,也不利于智能停车行业的整体发展。
为了赋能行业,推动发展,臻识科技于2019年进入路内停车领域。2年来,臻识基于10年停车技术积累和服务全国55%停车位的海量数据,连续突破三维底盘回归、超长跟踪等多项应用难题,逐步将路内停车高位视频技术行业的综合识别率提升至95%,赋能全国运营方,解决停车难的民生问题。
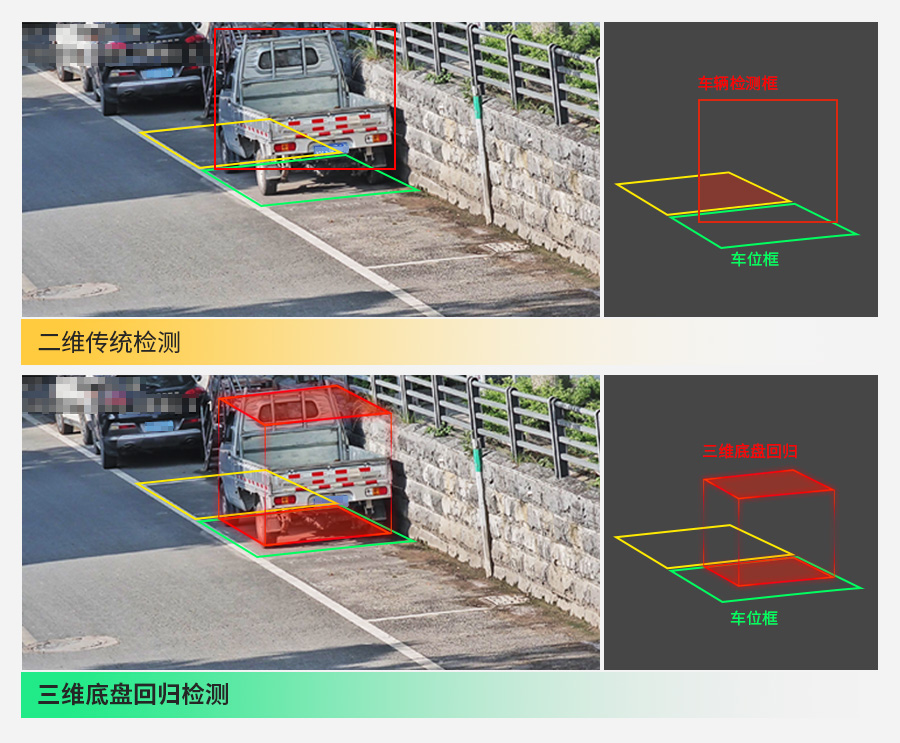
基于CNN二维检测框与车位框的IoU值,来进行车辆、车位匹配是传统路内停车高位视频技术中的一大挑战。
因为实际应用时,相机受现场条件限制,需灵活适应车位同侧、斜侧、对侧的成像视角和车辆斜停、垂停、侧停等多样停车方式,造成安装倾斜角和俯角过大,导致二维车辆检测框与车位框无法匹配或错位匹配。
理论上,针对场景绘制“算法车位框”和单独配置参数可以提高匹配精度,然而该方案增加了施工的难度和复杂度。为此,臻识融入了三维底盘回归技术。
该技术通过利用CNN网络自动拟合出每个车辆的底盘信息,得到车辆在三维空间的立体占位,大幅提升了车辆检测框与车位框关联匹配的准确度。
同时简化了施工流程,无论是同侧、异侧、对侧的部署角度,还是斜停、垂停、侧停的停车方式,均只需绘制实际车位线,无需其他参数配置,扩展了高位视频技术在路内停车的应用范围。
State-of-the-art跟踪策略通常仅能处理3s内的物体消失。
而在实际高位相机应用中,常发生10秒(过车),10分钟(堵车),甚至2个小时(大车停车)等遮挡情况,导致目标车辆消失,由此引发的出入场漏单和误报是影响路内停车准确收费的主要障碍。臻识对此提出了ReID融合车脸识别和以图搜车的技术方案。
该方案先基于ReID技术完成车辆部分组件(如车顶、车窗、后视镜)和车辆ID的再匹配,并加入交通管理中常用到的车脸识别和以图搜车技术实现ReID增强,以满足相似车辆相互遮挡的判断要求,在包括开关后备箱、过路大车遮挡等实际应用中均有出色表现。
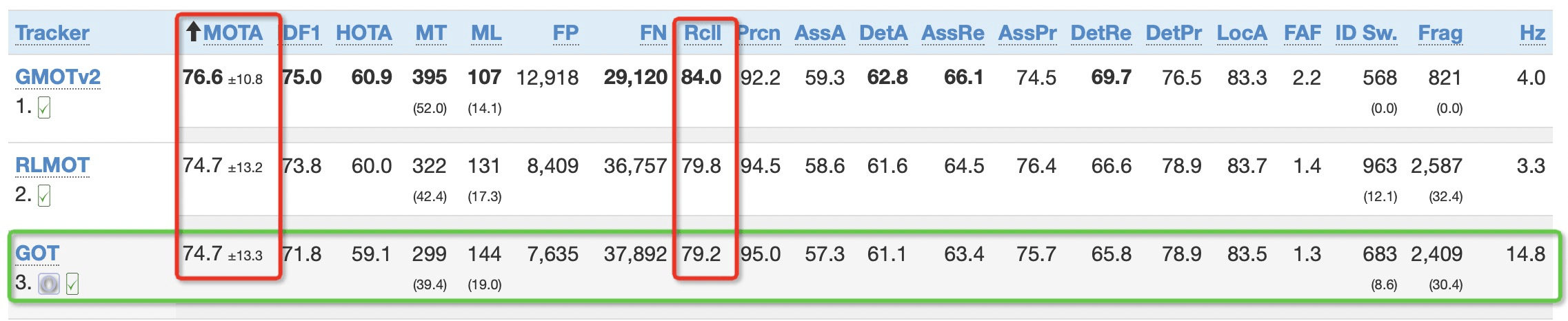
方案同时通过了超长遮挡数据集测试(数据集共115762段视频,含10%大于30分钟遮挡导致的目标消失数据)。在MOT挑战网站中排名最高的开源代码方案(GOT)对比测试中,GOT的MOTA(用于评估跟踪准确度:误报、错过目标、ID切换等)为12.8,RECALL(正确匹配目标检测率)为25.8,而臻识方案可保持75以上的MOTA以及90以上的RECALL,被验证为解决遮挡的有效方案。
跨越式的技术升级,让臻识路内停车产品在面世后迅速获得了市场认可。继路内停车低位视频桩H1L从青岛、日照扩展到凤庆等多地后,高位智能相机H1M也在不到1年的时间内迅速覆盖包括成都、绵阳、潮州、苏州等20多个城市,高中低位完整的产品矩阵可适应各类路内停车场景,大幅加快了在全国落地的速度,是路内停车行业加速向智能化、数字化升级的有力保障。
— Make Intelligent Everywhere —